Submitted by PaulSHEN1 35 StereoPilot: Learning Unified and Efficient Stereo Conversion via Generative Priors HKUSTGZ 2
Submitted by wujie10 32 Seedance 1.5 pro: A Native Audio-Visual Joint Generation Foundation Model ByteDance Seed 2
Submitted by Insta360-Research 29 Depth Any Panoramas: A Foundation Model for Panoramic Depth Estimation · 9 authors 2
Submitted by yulunliu 27 Generative Refocusing: Flexible Defocus Control from a Single Image · 3 authors 36 2
Submitted by adamdad 22 DeContext as Defense: Safe Image Editing in Diffusion Transformers The Hong Kong Polytechnic University 9 2
Submitted by ANIYA673 21 Alchemist: Unlocking Efficiency in Text-to-Image Model Training via Meta-Gradient Data Selection · 8 authors 2
Submitted by Yhmeng1106 19 The World is Your Canvas: Painting Promptable Events with Reference Images, Trajectories, and Text Ant Group 63 2
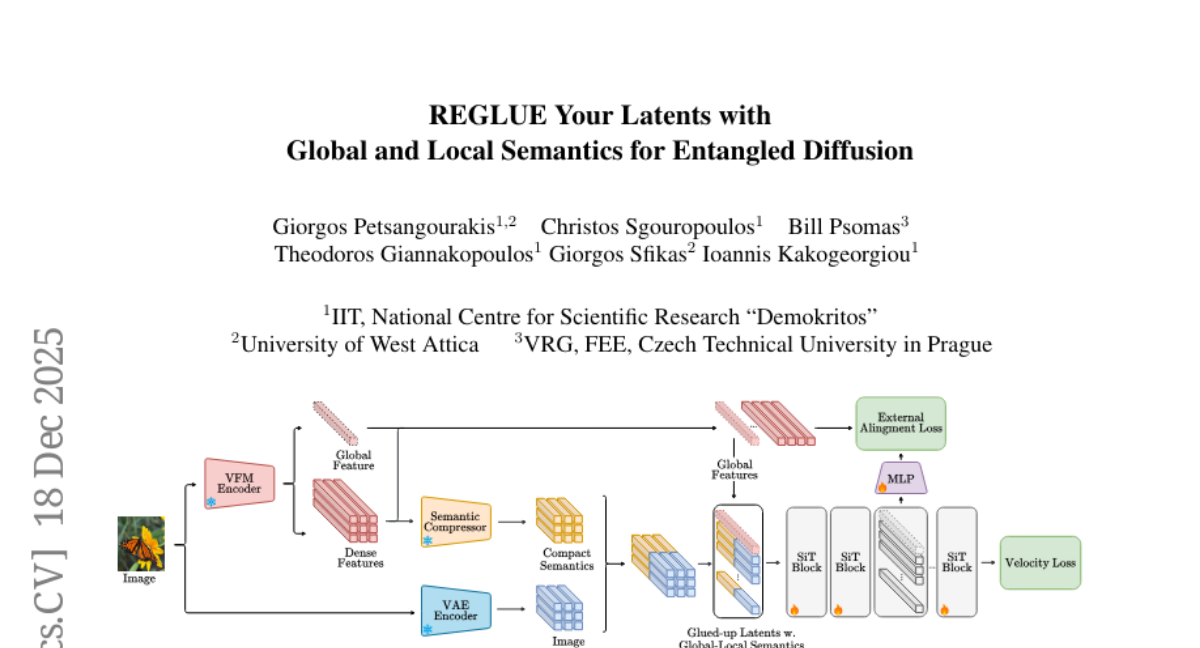
Submitted by gkakogeorgiou 19 REGLUE Your Latents with Global and Local Semantics for Entangled Diffusion · 6 authors 0 2
Submitted by lkeab 17 N3D-VLM: Native 3D Grounding Enables Accurate Spatial Reasoning in Vision-Language Models Tencent 20 2
Submitted by ashmrz 10 EasyV2V: A High-quality Instruction-based Video Editing Framework Snap Research 2
Submitted by PeterLauLukCh 9 Exploration v.s. Exploitation: Rethinking RLVR through Clipping, Entropy, and Spurious Reward Columbia University 2
Submitted by FrancisRing 9 FlashPortrait: 6x Faster Infinite Portrait Animation with Adaptive Latent Prediction Fudan University 75 2
Submitted by yushihu 9 Multimodal RewardBench 2: Evaluating Omni Reward Models for Interleaved Text and Image AI at Meta 23 2
Submitted by TainU 9 RePlan: Reasoning-guided Region Planning for Complex Instruction-based Image Editing · 9 authors 14 2
Submitted by zhangxgu 8 VenusBench-GD: A Comprehensive Multi-Platform GUI Benchmark for Diverse Grounding Tasks inclusionAI 2
Submitted by javi8979 7 Hearing to Translate: The Effectiveness of Speech Modality Integration into LLMs · 11 authors 13 1
Submitted by QHL067 5 Differences That Matter: Auditing Models for Capability Gap Discovery and Rectification Google 1
Submitted by zhykoties 4 Insight Miner: A Time Series Analysis Dataset for Cross-Domain Alignment with Natural Language Google 2
Submitted by JDihlmann 3 FrameDiffuser: G-Buffer-Conditioned Diffusion for Neural Forward Frame Rendering · 3 authors 2
Submitted by SingleZombie 3 Trainable Log-linear Sparse Attention for Efficient Diffusion Transformers Nanyang Technological University 2
Submitted by jasongzy 2 Make-It-Poseable: Feed-forward Latent Posing Model for 3D Humanoid Character Animation Tencent 8 2
Submitted by Aunderline 2 Coupled Variational Reinforcement Learning for Language Model General Reasoning · 9 authors 2
Submitted by cheryyunl 1 MomaGraph: State-Aware Unified Scene Graphs with Vision-Language Model for Embodied Task Planning UC Berkeley 2
Submitted by huzey 1 Vibe Spaces for Creatively Connecting and Expressing Visual Concepts · 6 authors 0 1
Submitted by LCZZZZ 1 Reasoning Within the Mind: Dynamic Multimodal Interleaving in Latent Space UC Santa Barbara NLP Group 1
Submitted by wudq - EmoCaliber: Advancing Reliable Visual Emotion Comprehension via Confidence Verbalization and Calibration · 3 authors 1 1
Submitted by woshiweidu - Nemotron-Math: Efficient Long-Context Distillation of Mathematical Reasoning from Multi-Mode Supervision NVIDIA 1


 taesiri
taesiri